SICK專家經常收到請求,希望為客戶選擇安全區域雷射掃描器提供咨詢,因為可供選擇的非常多,而且每一種都有不同的技術規格。客戶常常希望擁有防護區域「盡可能大」的產品。本文中,我們將説明可移動應用並不僅僅追求這一點。
自主駕駛工業車輛的最佳防護區域大小
Feb 9, 2021
掃描器可提供的最大防護區域是一項重要特色,但僅憑此數值無法決定此掃描器是否適合在自主駕駛工業車輛上應用。下文筆者將説明您的安全設備與控制系統的反應時間合起來會對所需的防護區域大小產生多麽重大的影響,以及這將如何直接影響您的應用。
關鍵的一點是,在自主駕駛工業車輛的應用中必須顧及諸多內容,如環境、煞車系統等,並且系統設計師應進行完整而全面的風險評估。本文所含的所有資訊僅用作指導,無法用來陳述可能存在的危險、排除未知的危險,或確定此類危險在實際應用中造成的危害程度。這些應當由此裝置的設計人員/製造商負責。
安全區域雷射掃描器的歷史
1976年,SICK向市場推出了第一款2類區域掃描器「Optotrap」,從此安全區域雷射掃描器在自動化系統的發展中起到了關鍵作用。1994年,SICK的第一款3類安全區域雷射掃描器面市。從此,這些裝置使生產更高效,並有助於提高勞動安全。一個具有代表性的範例是無人搬運車(AGV)市場,在此僅需更換衝擊條,安全區域雷射掃描器就能實現更高的行駛速度。衝擊條是一種接觸式感測器,為使無人搬運車能夠安全停止,不會造成人員受傷,車輛必須以足夠慢的速度移動,以便能夠及時反應。安全區域雷射掃描器能夠安全且非接觸式檢測前方遠處的人員與障礙物,從而使速度大幅提高,見插圖1。

安全區域雷射掃描器的類型
安全區域雷射掃描器是3類裝置,其要求請參閲EN 61496-1協調標準。某項安全功能用到3類安全區域雷射掃描器時,最大可達的效能等級(PL)或安全完整性級別(SIL)為PLd(EN ISO 13849標準)或SIL2(IEC 62061標準)。IEC 61496-3標準還包含了一項安全區域雷射掃描器的技術規範,涵蓋了對反應式漫射/反射光電防護設備(AOPDDR)的特殊要求。
此類設備用於固定及可移動應用,一旦辨識到防護區域內有人員、身體部位或意外的障礙物,就會使機器或車輛安全煞車或停止。
光飛行時間量測原理
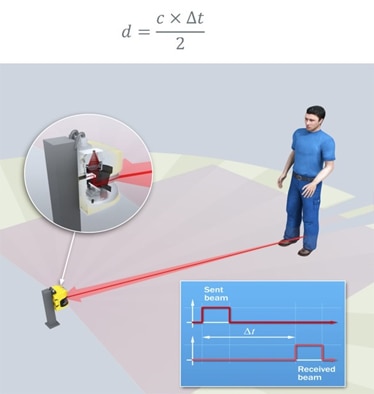
安全區域雷射掃描器運用了光飛行時間量測原理,是對光脈衝進行傳輸、反射和檢測。藉助光束的返回時間(ΔT)和光速(c = 3 x 108 m/s)計算物體與掃描器之間的距離(d),見圖2。
掃描器內部有一面反射鏡,能夠使光束發生旋轉,從而在平面上一個半徑範圍內進行量測。也就是説,掃描器能夠建立環境的輪廓,並且能夠針對掃描器配置各種區域的操作單元,用於開啟/關閉在安全功能中所用的輸出。部分掃描器因能夠同時分析多個區域,亦可用於多項安全功能,見插圖3。
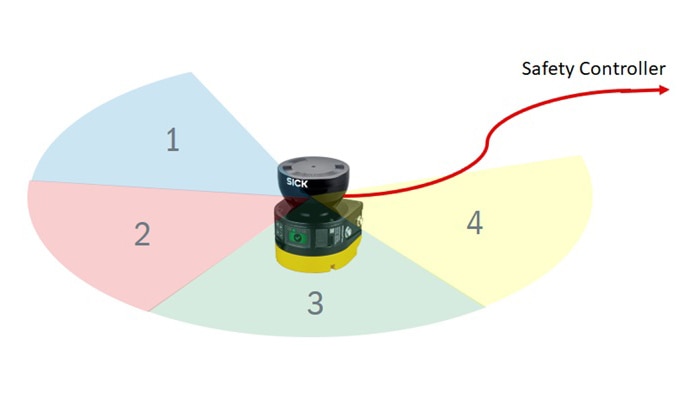
同時的區域分析能夠解決過去被認為十分困難的複雜應用,因為當時的開關輸出數量被限制為僅有一個、最多兩個。
區域的類型
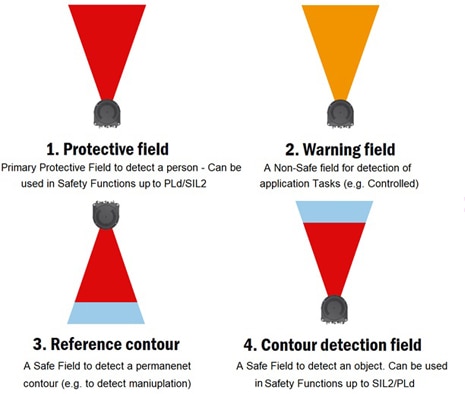
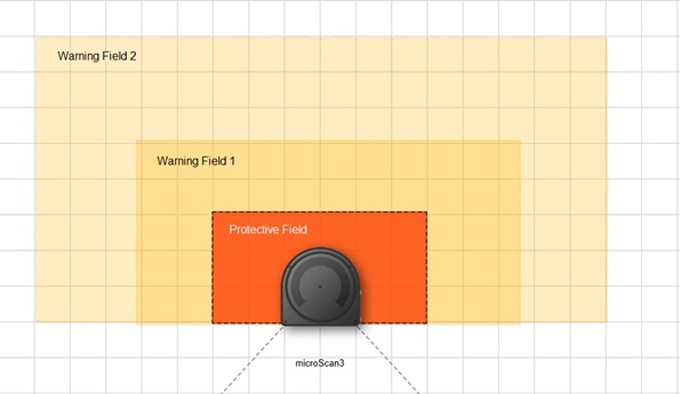
安全區域雷射掃描器一共設計了四種區域類型,見插圖4。
此外可將這些區域的組合合並為一個「區域組」,見插圖5。
安全區域雷射掃描器可以存儲許多區域組,根據多項輸入條件從中選取每個區域組。這些輸入條件以下列形式出現:
• 固定佈缐的輸入
• 軟體位元
• 編碼器的速度資訊
每項確定選擇哪個區域組的條件被稱為「監控情況」,其中包含此區域組及輸入條件,還可能包含「多重採樣」等資訊,筆者將在後文予以展開。
在此必須指出,在不同監控情況之間切換會使系統的反應時間延長,因此往往會使用同時的區域分析(同時觀察一個區域組中的多個防護區域),以縮短反應時間。
多重採樣
默認情況下,安全區域雷射掃描器必須連續兩次(兩圈)檢測一個物體,以確保可靠辨識。在困難環境下,並且基於掃描器的檢測穩定性,這可能會過於靈敏,並因汙物、粉塵、焊接火花或振動影響而導致問題。多重採樣能夠在生成檢測信號之前,就增加物體需要檢測的次數,這樣可以大大提高系統的可用性。例如,如果針對某個防護區域配置的多重採樣為3,並傳遞至開關輸出,則必須在防護區域內連續三次檢測到物體,然後輸出才會切換至「關」。
但是在使用此功能時存在一個讓步條件,因為每增加一次掃描,總反應時間就會延長,這對於無人搬運車應用會產生不利影響。
無人搬運車
在將編碼器整合至自主駕駛工業車輛時能夠量測速度,從而實施安全的運動控制,而不是緊急停止。藉助告警區域範圍,可確保視車輛與人或物體的距離而定,使車輛減速或加速,以確保有最佳的可用性,並且從後方踏入防護區域的可能性極低,因此車輛不必停止。但是車輛必須始終以足夠快的速度停止,以免人員受傷。
防護區域應由製造商確定。SICK為其安全區域雷射掃描器microScan3提供了下列公式:
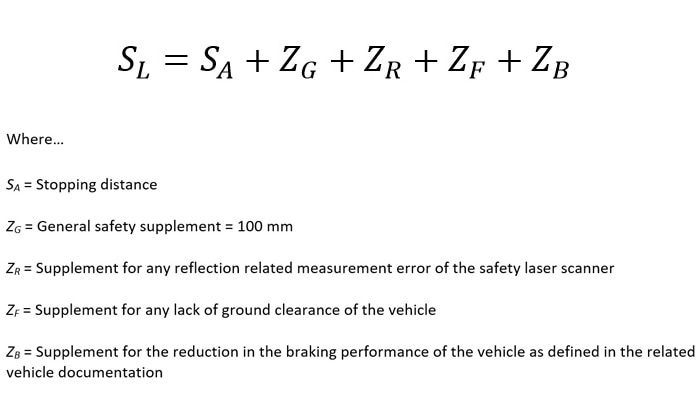
隨著SL值增加,自主駕駛工業車輛的覆蓋區域會擴大,因為掃描器受其反應時間影響,必須預判到較遠距離。出於下列原因,建議使SL值盡可能小:
• 使自主駕駛工業車輛在工作時能夠相互更加靠近
• 在周圍需要的活動空間較少
• 車輛停止或煞車較少地歸因於物體和人員
• 區域較小的車輛能夠更加快速地移動並提高其可用性
為此,必須研究控制系統的每個參數,以使應用最佳化,見插圖6。

在上述所有參數中,通常情況下在這個鏈條中最大、變動最多的數值是值SA,即車輛的停止距離。停止距離由車輛的煞車距離、在安全區域雷射掃描器反應時間內駛過的距離、及安全控制器的反應時間組成。
停止時間包含下列參數,見公式:
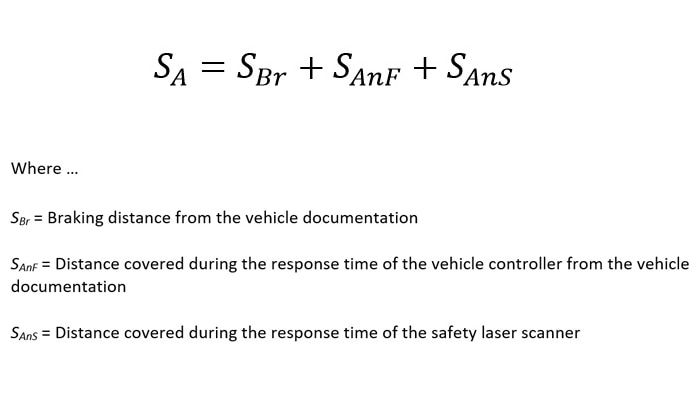
煞車距離取決於一系列因素,如所用的煞車類型、自主駕駛工業車輛所投入使用的環境、負載、行駛方向、車輪狀態等。必須仔細顧及這些因素。透過考查安全控制器、結構設計及接缐方法,可以改進車輛在控制器反應時間內駛過的距離。在安全區域雷射掃描器反應時間內駛過的距離則取決於所用掃描器的基本反應時間及掃描器配置。
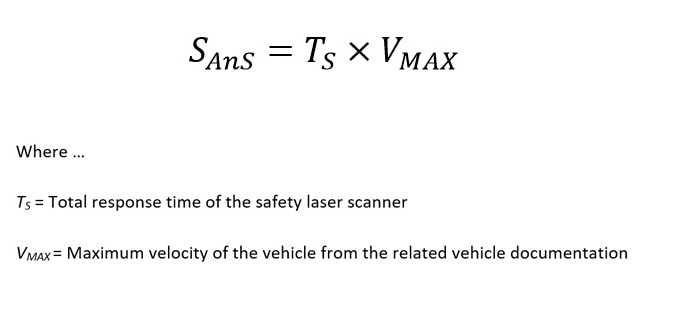
在安全區域雷射掃描器反應時間內駛過的距離
在安全區域雷射掃描器反應時間內駛過的距離取決於下列因素:
• 安全區域雷射掃描器的基本反應時間
• 車輛的最高速度
• 由多重採樣、傳輸時間、情況切換導致的附加反應時間
下方公式中清晰反映了上述內容:
無法對每種不同環境、每個自主駕駛工業車輛系統、每個安全控制器、每個掃描器及其連缐進行評估,必須從測試資料中推導數值。但是可以看出,如果掃描器反應迅速,並且能夠盡量減少多重採樣,將對系統的總反應時間產生直接影響。這將直接影響所需防護區域的大小。在實踐中,某些情況下,這會導致防護區域的差別達到10 m甚至更多。還有一點很重要,即盡可能縮短到管理系統的傳輸時間。這可以透過多種方式實現,例如將輸出信號切換裝置(OSSD)與安全控制器的輸入固定連缐,或者運用「同步區域分析」進行安全通訊,以同時監控多個防護區域。
結論:由此可以獲得防護區域的最佳大小
防護區域必須與應用適合。但在可移動的應用中,為避免錯誤觸發、並且出於車輛佔地面積的考慮,而使防護區域盡可能小,這樣做具有優勢。因此需要顧及掃描器及整個系統的反應時間。多次掃描會延長掃描器的反應時間。此外還需注意,每多一次掃描,需要多出多少反應時間。掃描器的檢測原理越堅固可靠,在複雜環境下就越有可能很少需要多次掃描。從而,車輛能夠以更高的速度,在更接近環境輪廓的地方工作,這將提高整體生產能力與效率,減少裝置的覆蓋區域。同樣還應顧及掃描器所連接的控制系統以及連接的方式。在複雜應用中同時進行區域分析或在簡單應用中採用固定佈缐,可改進反應時間。安全區域雷射掃描器可提供的最大防護區域是一項重要特色,但對於自主駕駛工業車輛中的應用,更重要的是考查總的反應時間及檢測的穩定性,以使防護區域盡可能小,同時又足夠大。
更多文章





Martin Kidman
SICK英國分公司機器安全部產品專家
Martin Kidman於2010年在利物浦大學獲得博士學位,自2006年起曾在多家感測器製造商的工業自動化部門工作。2013年起,他進入SICK英國分公司工作,擔任工業安全應用機器安全部產品專家。此外,他還獲得了功能安全工程師證書(TUV Rheinland, #13017/16)。
