
Brugervenligt og fleksibelt sensorsystem til lokalisering af elementer
PLOC2D
Mulighed for kommunikation med standard-middleware-specifikation ORiN
Hvad er ORiN?
ORiN (Open Robot/Resource interface for the Network) er en standard-middleware-specifikation, der er udviklet til systemer i fabriksautomationen. ORiN2, den anden version af specifikationen, byder på et standardinterface til applikationer, sensorer, styringer og dataordninger, inklusive standardkommunikationsprotokoller. Providermoduler (udvidelsesmoduler), der etableres på basis af specifikationen, muliggør en standardiseret adgangsmetode til forskellige enheder. Dermed kan IT-systemers genanvendelighed og pålidelighed i en fabrik forbedres, tidsforbruget til udvikling af et system kan forkortes, og implementeringen kan foretages hurtigere.
I robotstyringer anvendes ORiN-kompatible add-ins, så eksterne enheder såsom PLC’er, kameraer og sensorer kan anvendes sammen med en fælles interfacespecifikation. Disse add-ins betegnes som Provider. SICK har erkendt fordelene ved ORiN og suppleret sin omfattende sensorportefølje til robotteknologien med den første Provider til robotstyringssystemet PLOC2D.
ORiNs fordele

Til slutbrugere:
- Systemomgivelse, der er nem at etablere og uafhængig af producenten
- Mulighed for procesgasovervågning og fjernvedligeholdelse af produktionslinjen

Til systemintegratorer:
- Nem integration af robotstyringssystemet PLOC2D i robotsystemet
- Hurtig idriftsættelse ved hjælp af et standard-ORiN-interface
- Minimalt ressourceforbrug til programmering med ORiN-Provider (DLL-biblioteker)

Til producenter af enheder og OEM’er:
- Forkortelse af processerne ved udvikling af kommunikationsinterfaces og tests
- Samarbejde med andre producenter
Eksempler på løsninger
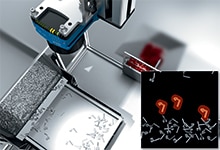
Lokalisering af elementer i anyfeederen
En anyfeeder transporterer og vender små elementer uden tilbageførsel eller brug af transportbånd. I den forbindelse justeres de små elementer vilkårligt. Robotstyringssystemet PLOC2D detekterer hurtigt og sikkert deres position og transmitterer positionsdata og retninger til robotstyringen. Det standardiserede ORiN-interface sikrer problemfri kommunikation mellem PLOC2D og robotstyringen. Ved hjælp af de indsamlede informationer kan robotten gribe de elementer, der ligger rigtigt, og tilføre dem til den efterfølgende proces. Elementer, der ligger forkert, ignoreres, og når de elementer, der ligger korrekt, er grebet, positioneres de på ny ved hjælp af pulslignende vertikale vibrationer.
Produkter
Robotstyringssystemer



Samarbejde i øjenhøjde
Uanset om det drejer sig om robot vision, safe robotics, end-of-arm tooling eller position feedback – SICK-sensorer sætter robotten i stand til at opfatte præcist.
Læs mere