Geschirrspülmaschinen müssen Hunderte aufwendige Testzyklen durchlaufen, um ihren Dienst im Alltag zuverlässig zu leisten. Um das Personal während der Durchführung der Tests zu entlasten, wurde am Fraunhofer IPA im Auftrag von Bosch und Siemens Hausgeräte (BSH) ein neues mobiles Robotersystem entwickelt, das die komplette Bedienung der Maschine übernimmt. Ein Schwerpunkt dabei war die Sicherheit des Anwenders: Das Sicherheitskonzept umfasst die Absicherung des Arbeitsraums mit Laserscannern, erlaubt aber auch das Handführen des Roboters mit Hilfe eines Zustimmtasters.
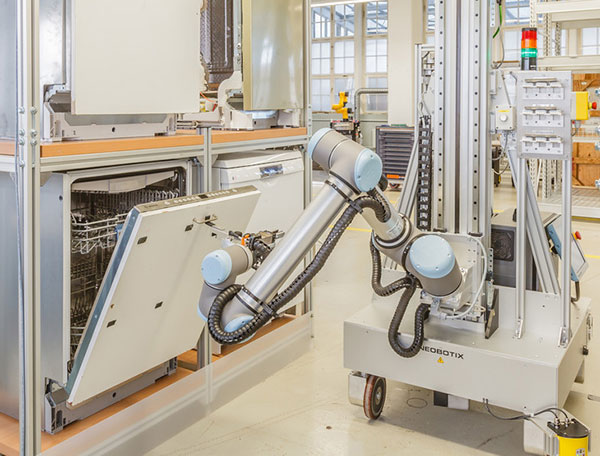 Autonomer Roboter zur Bedienung von Spülmaschinen, Quelle-Fraunhofer-IPA
Autonomer Roboter zur Bedienung von Spülmaschinen, Quelle-Fraunhofer-IPA
Um die Haltbarkeit von Haushaltsgeräten und die Steuerung auf Fehler zu überprüfen, müssen die Hersteller Langzeittests durchführen. Geschirrspüler werden beispielsweise mit unterschiedlichen Reinigungsmitteln und Wasserhärten getestet. Jeweils einige hundert Testzyklen sind dafür notwendig, bei denen die Maschinen geöffnet, neuer Schmutz und neues Reinigungsmittel eingelegt und das Programm neu gestartet werden müssen. Bisher waren diese Tests sehr aufwendig, da die Maschinen der Reihe nach und manuell im Einschichtbetrieb bedient wurden. Forscher des Fraunhofer IPA haben für BSH ein mobiles Robotersystem entwickelt, das die komplette Bedienung der Geschirrspüler im Rahmen der Qualitätssicherung übernimmt. Im automatisierten Dauerbetrieb werden Schmutz und Reinigungstabs eingefüllt und die Maschine dann wieder gestartet. Das Thema Sicherheit war dabei eine große Herausforderung, denn um die zur Bedienung der Spüler notwendigen Handgriffe einzulernen, sollen Bediener nah an den Roboter herantreten und diesen sogar handführen können.
 Bedienpanel des Roboterarms. Unten: Sicherheits-Laserscanner S300, Quelle: Fraunhofer IPA / SICK
Bedienpanel des Roboterarms. Unten: Sicherheits-Laserscanner S300, Quelle: Fraunhofer IPA / SICK
Dies wurde durch den Einsatz eines ergonomisch im Werkzeug integrierten, zweistufigen Zustimmtasters erreicht. Während des Einlernens von Bewegungen über das Bedienpanel überwachen Sicherheits-Laserscanner S300 an den Ecken der mobilen Basis den Bereich um den Roboter herum. Kommt eine Person dem Roboter zu nahe, werden alle Bewegungen gestoppt. Abhängig davon, ob die mobile Plattform oder der Arm des Roboters bewegt wird, wird dabei zwischen verschiedenen Schutzfeldgrößen umgeschaltet. Die Eigenschaften des Roboterarms werden im Sicherheitskonzept speziell berücksichtigt. Insbesondere wird genutzt, dass der Arm in gewissen Grenzen eigensicher ist und so beispielsweise in einigen Situationen weiter aktiv bleiben kann, während die stärkeren und damit gefährlicheren Achsen der mobilen Roboterplattform abgeschaltet werden müssen.
 Sicherheits-Steuerung Flexi Soft
Sicherheits-Steuerung Flexi Soft
Kern des Sicherheitskonzepts ist die Sicherheits-Steuerung Flexi Soft von SICK, in der Sensordaten und die Signale der Nothaltsysteme zusammenlaufen. Darüber hinaus wurde eine Schnittstelle zum Roboter-Betriebssystem ROS implementiert, das auf dem mobilen Roboter zum Einsatz kommt. Diese ist so gestaltet, dass Inkonsistenzen und Fehler in der nicht sicherheitsgerichteten Software erkannt werden. Umgekehrt ist jedoch sichergestellt, dass ein Fehler in der Software die Integrität der sicheren Steuerung nicht beeinträchtigt.

Theo Jacobs
"Um neue Bewegungen intuitiv vorzugeben, kann man den Roboterarm einfach an die Hand nehmen", so Theo Jacobs, Projektleiter und wissenschaftlicher Mitarbeiter in der Abteilung Roboter- und Assistenzsysteme. Alternativ erfolgt die Steuerung des Roboterarms oder der mobilen Plattform über entsprechende Tasten auf dem Bedienpanel. Mit einem Knopfdruck merkt sich der Roboter eine Greifposition, ein weiterer Klick auf der grafischen Oberfläche legt fest, dass der Greifer geöffnet, geschlossen oder ein Sensor abgefragt werden soll.

Zum Einlernen wird der Roboter in die Hand genommen / Quelle-Fraunhofer-IPA
Die Ablaufskripte sind grafisch dargestellt, sodass auch ein Laie diese nach kurzem Einlernen aus den programmierten Bewegungen zusammenstellen kann. Über einen Leitrechner wird festgelegt, welche Maschinen zu bedienen und welche vom Test ausgenommen sind. Die vom Roboter protokollierten Testdaten, wie etwa die Anzahl der durchgeführten Zyklen, lassen sich von den Mitarbeitern an diesem jederzeit bequem abrufen. Das am Fraunhofer IPA entwickelte mobile Robotersystem lässt sich einfach an individuelle Anforderungen anpassen. Damit können Unternehmen unterschiedliche Prozesse automatisieren: Neben unterschiedlichen Aufgaben in der Qualitätssicherung lassen sich Roboter dieser Art auch für die Unterstützung bei der Logistik und Montage oder für Inspektionsaufgaben einsetzen.
- Produktinformationen: Sicherheits-Laserscanner S300, Sicherheits-Steuerung Flexi Soft
- Produktportfolio: ScannerPlus, Sicherheits-Laserscanner, Sicherheits-Laserscanner S300, sens:Control - sichere Steuerungslösungen

